SMART and NUS pioneer neural blueprint for human-like intelligence in soft robots
- SMART

- Feb 5
- 5 min read
A newly developed AI control system using neuron-inspired learning enables soft robotic arms to learn a broad set of motions once and adapt instantly to changing conditions without retraining
Inspired by the way the human brain learns, this system is one of the first to achieve three aspects needed to deploy soft robots in real-world environments — learning capabilities that can be generalised across tasks, the ability to maintain performance under diverse disturbances, and a metric that enables stability during adaptation
Validated across multiple platforms, this innovation paves the way for real-world applications across diverse industries, including healthcare, manufacturing, assistive robotics and more
Singapore, 5 February 2026 – Singapore-MIT Alliance for Research and Technology’s (SMART) Mens, Manus & Machina (M3S) interdisciplinary research group, and National University of Singapore (NUS), alongside collaborators from Massachusetts Institute of Technology (MIT) and Nanyang Technological University (NTU Singapore), have developed an AI control system that enables soft robotic arms to learn a wide repertoire of motions and tasks once, then adjust to new scenarios on the fly without needing retraining or sacrificing functionality. This breakthrough brings soft robotics closer to human-like adaptability for real-world applications, such as in assistive robotics, rehabilitation robots, and wearable or medical soft robots, by making them more intelligent, versatile and safe.
Unlike regular robots that move using rigid motors and joints, soft robots are made from flexible materials such as soft rubber and move using special actuators – components that act like artificial muscles to produce physical motion. While their flexibility makes them ideal for delicate or adaptive tasks, controlling soft robots has always been a challenge because their shape changes in unpredictable ways. Real-world environments are often complicated and full of unexpected disturbances, and even small changes in conditions – like a shift in weight, a gust of wind or a minor hardware fault – can throw off their movements.
Despite substantial progress in soft robotics, existing approaches often can only achieve one or two of the three capabilities needed for soft robots to operate intelligently in real-world environments: using what they’ve learned from one task to perform a different task, adapting quickly when the situation changes, and guaranteeing that the robot will stay stable and safe while adapting its movements. This lack of adaptability and reliability has been a major barrier to deploying soft robots in real-world applications until now.
In a study titled ‘A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations’, recently published in Science Advances, the researchers describe how they developed a new AI control system that allows soft robots to adapt across diverse tasks and disturbances. The study takes inspiration from the way the human brain learns and adapts and was built on extensive research in learning-based robotic control, embodied intelligence, soft robotics and meta-learning.
The soft robotic arm can safely operate close to the human body without causing discomfort or injury. The AI control system is well-suited for assistive scenarios like showering, where the arm can help wipe the back — supporting people with limited mobility and easing the load on caregivers (Photo credit: NUS)

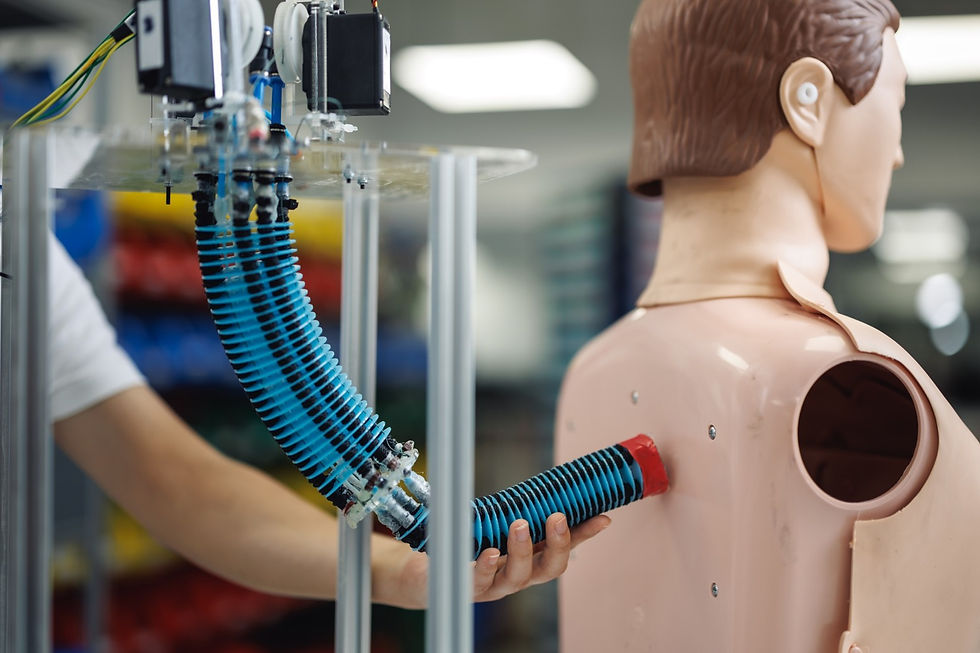
The 160g soft robotic arm with a 37.2 g soft gripper performs a pick-and-place task with a 56.4 g object, bending smoothly to grasp, lift and reposition the object in a controlled motion. The combined payload is 58.5% of the arm’s mass, demonstrating stable manipulation under a relatively high payload while maintaining compliant, precise operation (Photo credit: SMART M3S)
The system uses two complementary sets of “synapses” – connections that adjust how the robot moves – working in tandem. The first set, known as “structural synapses”, is trained offline on a variety of foundational movements, such as bending or extending a soft arm smoothly. These form the robot’s built‑in skills and provide a strong, stable foundation. The second set, called “plastic synapses”, continually updates online as the robot operates, fine-tuning the arm’s behaviour to respond to what is happening in the moment. A built-in stability measure acts like a safeguard, so even as the robot adjusts during online adaptation, its behaviour remains smooth and controlled.
“This new AI control system is one of the first general soft-robot controllers that can achieve all three key aspects needed for soft robots to be used in society and various industries. It can apply what it learned offline across different tasks, adapt instantly to new conditions and remain stable throughout — all within one control framework,” said Associate Professor Zhiqiang Tang, who was a Postdoctoral Associate at M3S and at NUS when he carried out the research, is the first and co-corresponding author of the paper, and is now Associate Professor at Southeast University (SEU China).

The AI control system enables the soft robotic arm to learn and achieve precise movements, such as bending into a curved ‘C’ shape, similarly to how a human arm bends. In an anti‑disturbance test, the arm was challenged under fixed and continuously changing fan speeds, and still achieved the target shape with 93.8% accuracy under the most challenging scenario (Photo credit: SMART M3S)
“Soft robots hold immense potential to take on tasks that conventional machines simply cannot, but true adoption requires control systems that are both highly capable and reliably safe. By combining structural learning with real-time adaptiveness, we’ve created a system that can handle the complexity of soft materials in unpredictable environments. It’s a step closer to a future where versatile soft robots can operate safely and intelligently alongside people — in clinics, factories, or everyday lives,” said Professor Daniela Rus, Co-lead Principal Investigator at M3S, Director - Computer Science and Artificial Intelligence Laboratory (CSAIL) at MIT, and co-corresponding author of the paper.
The system supports multiple task types, enabling soft robotic arms to execute trajectory tracking, object placement and whole-body shape regulation within one unified approach. The method also generalises across different soft-arm platforms, demonstrating cross-platform applicability.
The system was tested and validated on two physical platforms – a cable-driven soft arm and a shape-memory-alloy–actuated soft arm – and delivered impressive results. It achieved a 44–55% reduction in tracking error under heavy disturbances, over 92% shape accuracy under payload changes, airflow disturbances and actuator failures, and stable performance even when up to half of the actuators failed.
“This work redefines what’s possible in soft robotics. We’ve shifted the paradigm from task-specific tuning and capabilities toward a truly generalisable framework with human-like intelligence. It is a breakthrough that opens the door to scalable, intelligent soft machines capable of operating in real-world environments,” said Professor Cecilia Laschi, Principal Investigator at M3S, Provost’s Chair Professor, Department of Mechanical Engineering at the College of Design and Engineering and Director of the Advanced Robotics Centre at NUS, and co-corresponding author of the paper.
This breakthrough opens doors for more robust soft robotic systems to develop manufacturing, logistics, inspection and medical robotics without the need for constant reprogramming – reducing downtime and costs. In healthcare, assistive and rehabilitation devices can automatically tailor their movements to a patient’s changing strength or posture, while wearable or medical soft robots can respond more sensitively to individual needs, improving safety and patient outcomes.
The researchers plan to extend this technology to robotic systems or components that can operate at higher speeds and more complex environments, with potential applications in assistive robotics, medical devices and industrial soft manipulators, as well as integration into real-world autonomous systems.
The research conducted at SMART was supported by the National Research Foundation Singapore under its Campus for Research Excellence and Technological Enterprise (CREATE) programme.



Comments